Introduction

Wind sensors have traditionally been mechanical devices. The disadvantage of mechanical sensors, like the anemometer and the wind vane is that they need regular maintenance. There are also non-mechanical wind sensors, like the Ultrasonic and the Laser-Doppler sensor but those are very expensive.

At the Electronic Instrumentation lab we have been working on a cost-effective, low-power, accurate, solid state wind speed and direction sensor. The sensor has no moving parts therefore it is robust and essentially maintenance-free. The first ideas and designs originate from as early as 1983.
Early Operating principle
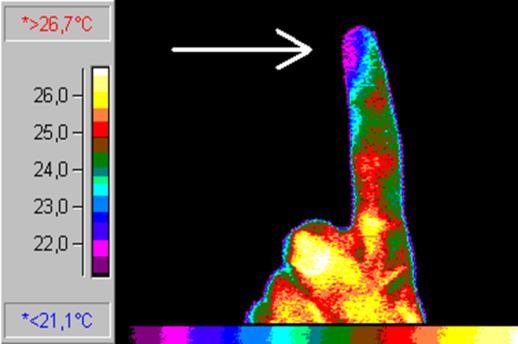
The idea of measuring wind direction and speed started based on the principle of thermal measurement, much like we do as a human, sticking your finger in the air, ‘feeling’ where the wind is coming from.

This idea has translated to thermal measurement on a chip:
The center of a plate is heated above ambient temperature. When an airflow passes the plate the temperature pattern will be shifted depending on the direction and speed of the airflow, so inducing a temperature gradient dT, measured at points A and B we obtain both wind speed and direction.
Smart wind sensor
Since the 80’s the sensor has evolved into a smart, accurate, low-power, solid state wind speed and direction sensor.
The main differences:
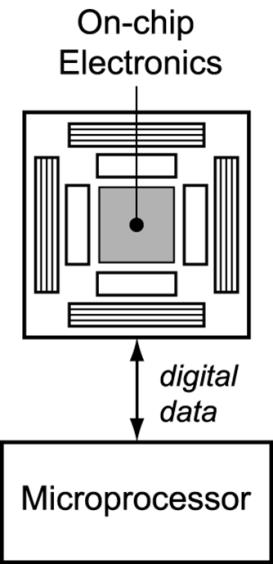
- Measure heater power and adjust it so that temperature differences are canceled (thermal balancing) i.o. measure temperature differences only.
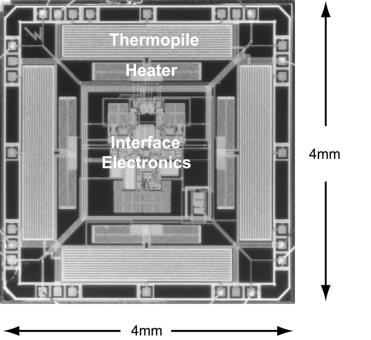
- All electronics on-chip, SD (Sigma-Delta) conversion i.o. analog electronics, outputs can be directly connected to a microprocessor.
- No trimming required.
- Reduced power consumption, 25 mW i.o. 1500 mW.
Specifications
| Operating range | 0…25.5 m/s |
| Minimum wind speed | 0.2 m/s |
| Inaccuracy (typ.) | Speed: ±0.5 m/s or 3% Direction: ± 3° |
| Resolution | 0.1 m/s |
| Response time | < 1 s |
| Measurement rate | 3 Hz (speed & direction) |
| Dimensions | ∅ 120mm, height 105 mm |
| Power consumption (max) | 25 mW |
